Die automatisierte Durchführung einer Waldinventur

Ein Teil unseres neuesten Projekts für die RAG war die Durchführung einer Waldinventur als Proof-of-Concept. RAG ist spezialisiert auf das Langzeitmonitoring von Bergbauschäden, d.h. die automatische Erfassung von Landschaftsveränderungen, und hier insbesondere von Bodenbewegungen. Eine Waldinventur kann helfen, die Ursachen von Landschaftsveränderungen besser zu isolieren, indem Veränderungen im Zeitablauf beobachtet werden. Es wird dabei festgestellt, welche davon Folgeschäden des Tagebaus sein können.
Ziel war die exakte Bestimmung von Baumpunkten in der Punktwolke sowie die Segmentierung in Bauminstanzen mit entsprechenden Inventardaten:
- Objekt-ID,
- Position,
- Ausdehnung der Krone
als Ergebnis.


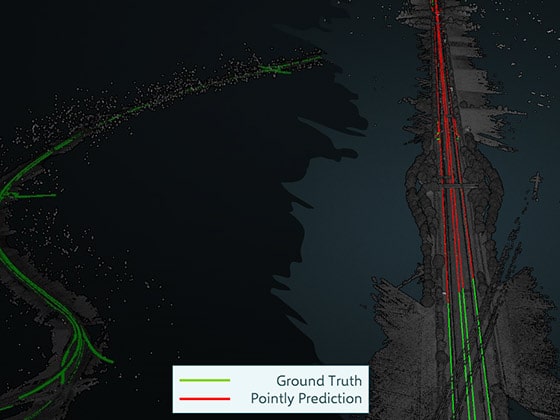
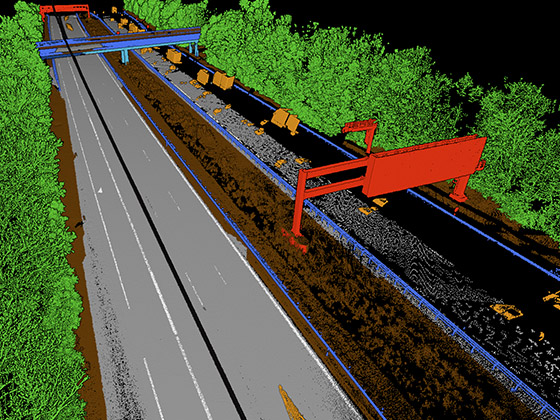
Wir kombinierten Deep Learning und verschiedene intelligente Algorithmen, um Baumpunkte zu identifizieren und einzelne Bäume von oben zu trennen, sowohl mit sichtbaren Baumstämmen als auch ohne. Am Anfang musste die Vegetation manuell klassifiziert werden, um einen umfassenden Satz von Trainingsdaten für das neuronale Netz zu generieren, damit der Prozess in Zukunft automatisch ablaufen kann. Mit Hilfe von Pointly – unserer selbst entwickelten SaaS Plattform für 3D point cloud classification – und seinen einfach zu bedienenden Selektionswerkzeugen konnte diese Aufgabe jedoch in nur wenigen Tagen erledigt werden.
Wir haben zunächst alle Bäume und andere Objekte mit Pointly klassifiziert, um mit der Instanzsegmentierung der einzelnen Bäume fortzufahren. Die Segmentierung wurde mit einer Kombination von Baummerkmalen (wie Kronenmaxima), Baumstumpfpositionen und georäumlichen Algorithmen durchgeführt. Stumpfposition und -höhe wurden für jedes Baumsegment bestimmt, während die Kronenausdehnung mittels 2D-Projektion bestimmt wurde. Anschließend wurden die Ergebnisse (Klassifikation und Instanzsegmentierung) in andere gängige Geodatentypen (z.B. GeoJSON, Esri Shape File) übertragen und mit zusätzlichen Informationen wie Höhenattributen angereichert.
Das Proof-of-Concept im Projekt mit der RAG war erfolgreich. Es wurden 2 Kartenebenen mit Baumzählungen, Kronenformen sowie Baumhöhen generiert. Nun werden laufend neue Daten aufbereitet, so dass dieser Service bald automatisiert und auch direkt in Pointly angeboten werden kann.
Weitere Use Cases dieser Kategorie
Die automatisierte Generierung von CAD-Modellen aus 3D Highway-Scans Use Case lesen
Das automatische Labeln von Punktwolken aus Highway Scans Use Case lesen

Die automatische Erkennung unterschiedlicher LKWs in Orthofotos mit ArcGIS-Pro Use Case lesen

