The automated conduction of a forest inventory

Part of our latest project for RAG was to conduct a forest inventory as a proof of concept. RAG specializes in long-term monitoring of mining damages, i.e. automatic detection of landscape changes, and here especially ground movements. A forest inventory can help to better isolate the causes of changes in the landscape through monitoring changes over time and observing which of them may be consequential damage to opencast mining.
The goal was to provide exact tree point identification in the point cloud as well as individual tree separation with corresponding inventory data:
- object-ID,
- position,
- crown’s extent
as a result.


We combined deep learning and different smart algorithms to identify tree points and separate individual trees from above, both with visible tree trunks and without. Initially, the vegetation had to be classified manually to generate a comprehensive set of training data for the neural network so the process can be done automatically in the future. However, with the help of Pointly – our self-developed SaaS platform for 3D point cloud classification – and its easy-to-use selection tools this task was performed in just a few days.
We first classified all trees and other objects with Pointly to proceed with instance segmentation of the individual trees. The segmentation was performed using a combination of tree features (such as crown maxima), tree stump positions and geospatial algorithms. Stump position and height were determined for each tree segment, whereas the crown extent was determined by means of 2D projection. Afterwards, the results (classification and instance segmentation) were transferred into other common geo data types (i.e. GeoJSON, Esri shape file), enriched with additional information such as height attributes.
The proof of concept in the project with RAG was successful. 2 map layers with tree counts, canopy shapes as well as tree height were generated. Now ongoing processing of new data is being performed so that this service can be automated and offered also directly in Pointly soon.
Other Use Cases in this category
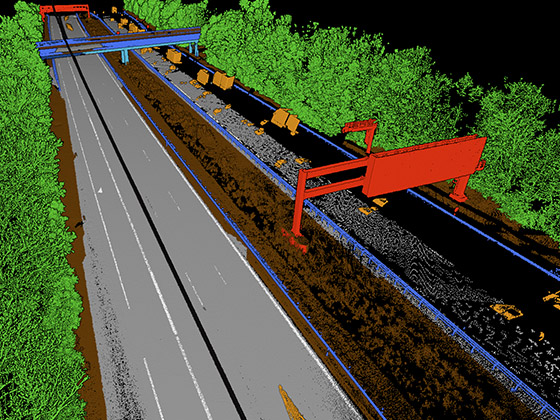
The automatic labeling of point clouds from highway scans Use Case lesen
The automated generation of CAD models from 3D highway Use Case lesen

The automatic detection of different trucks in orthophotos with Use Case lesen

